
As soon as I finished my Horizontal Travel Robot Arm prototype and was able to reliable make pick and place motions using simple X, Y, Z inputs, I decided to build a real use case that could show it’s potential for real world applications.
Enabling the robot to have Computer Vision seems like a very straightforward case, and I learned a lot that I want to share, as most likely you will find it useful.
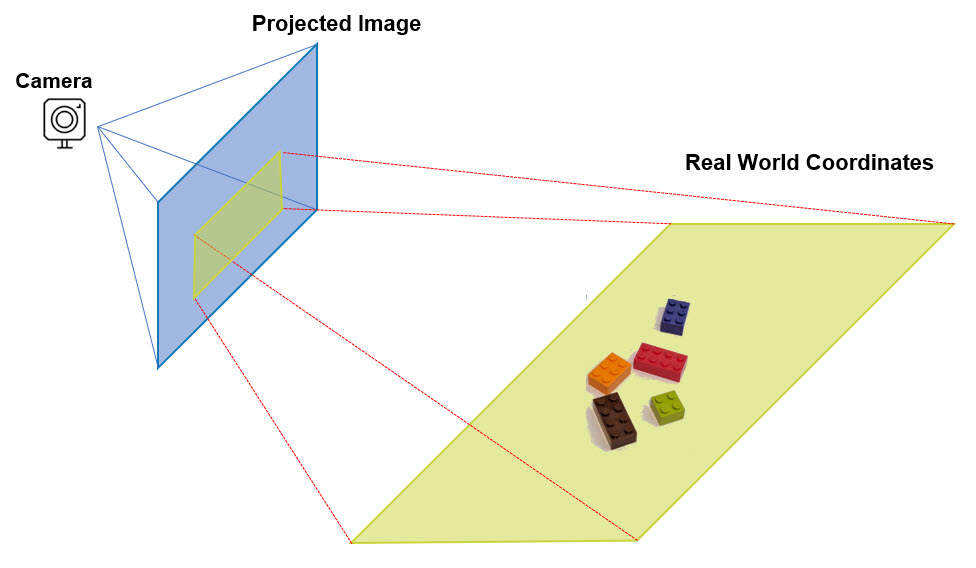
Continue reading Calculate X, Y, Z Real World Coordinates from Image Coordinates using OpenCV